List items
Items from the current list are shown below.
Blog
9 Aug 2012 : PiBot2 #
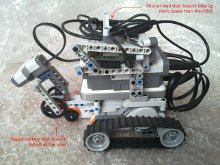
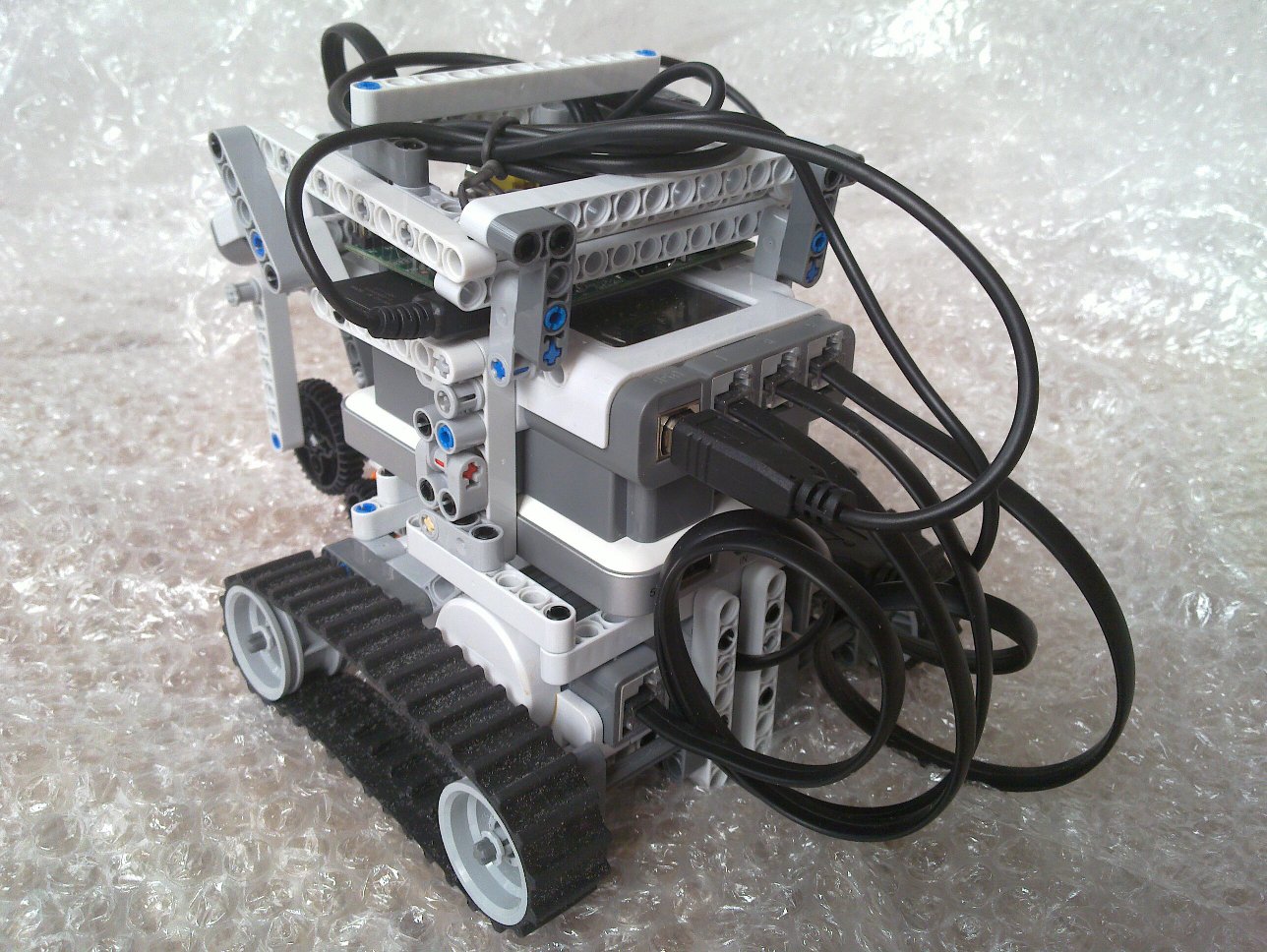
After a frantic buying spree on Amazon and some tense anticipation each day with the post, PiBot has now been augmented (Deus Ex style) with better hardware, neater design and improved software. Meet PiBot2!. The upgrades include a much larger (7000 mAh) battery, a USB connector that doesn't cut power when riding over bumps; a mere 1m long cable (as compared to the previous 5m long version), and auto-roaming code that will explore the room without intervention (mostly!).
The cable is still a good 80cm too long, and the exploration code is simple to say the least, but it's one step further on. Using PyGame for the code means proper asynchronous keyboard input, so that human-control and auto-exploration can be switched between seamlessly. The next part of the plan is to draw objects in the PyGame window as PiBot senses them. I don't expect this to work very well, but I plan to have fun trying it!
Below are a few screenshots of the new PyBot, along with the code in its latest state.




#!/usr/bin/env python
#
import pygame
import sys
from pygame.locals import *
import nxt
import nxt.locator
from nxt.sensor import *
from nxt.motor import *
from time import sleep
def input(events, state):
for event in events:
if event.type == QUIT:
state = 0
if event.type == KEYDOWN:
if event.key == K_q:
print "q"
state = 0
elif event.key == K_w:
print "Forwards"
both.turn(100, 360, False)
elif event.key == K_s:
print "Backwards"
both.turn(-100, 360, False)
elif event.key == K_a:
print "Left"
leftboth.turn(100, 90, False)
elif event.key == K_d:
print "Right"
rightboth.turn(100, 90, False)
elif event.key == K_f:
print "Head"
head.turn(30, 45, False)
elif event.key == K_r:
state = explore(state)
return state
def explore(state):
if state == 1:
state = 2
print "Explore"
elif state == 2:
state = 1
print "Command"
return state
def autoroll():
if Ultrasonic(brick, PORT_2).get_sample() < 20:
both.brake()
both.turn(-100, 360, False)
sleep(1)
leftboth.turn(100, 360, False)
sleep(1)
else:
both.run(100)
def update(state):
if state == 2:
autoroll()
return state
pygame.init()
window = pygame.display.set_mode((400, 400))
fpsClock = pygame.time.Clock()
brick = nxt.locator.find_one_brick()
left = Motor(brick, PORT_B)
right = Motor(brick, PORT_C)
both = nxt.SynchronizedMotors(left, right, 0)
leftboth = nxt.SynchronizedMotors(left, right, 100)
rightboth = nxt.SynchronizedMotors(right, left, 100)
head = Motor(brick, PORT_A)
state = 1
print "Running"
while (state > 0):
state = input(pygame.event.get(), state)
#pygame.display.flip()
state = update(state)
print "Quit"
Comments
Uncover Disqus comments